党委人才工作部、人才工作处
近日,我校自动化学院、人工智能学院物联网智能机器人团队范保杰教授、徐丰羽教授与硕士生李啸天同学的研究成果 GAFusion: Adaptive Fusing LiDAR and Camera with Multiple Guidance for 3D Object Detection(《面向三维目标检测的相机与激光雷达全局自适应融合方法》)被国际计算机视觉与模式识别会议CVPR2024录用。近年来,该团队已在计算机视觉顶级会议CVPR、ECCV,机器人顶级会议ICRA、IROS发表高水平论文10余篇。
该论文聚焦于多模态3D目标检测,特别是在鸟瞰图(BEV)视角下的应用。研究团队提出了一种名为GAFusion创新方法,通过稀疏深度引导(SDG)和激光雷达占据引导(LOG)生成具有丰富深度信息的3D特征,利用激光雷达引导的自适应融合transformer(LGAFT)从全局角度增强不同模态BEV特征之间的交互。此外,他们还设计了一个BEV网格来存放多尺度下采样特征,并开发了多尺度双路径transformer(MSDPT),以扩大不同模态特征的接受域,显著提高了检测性能。GAFusion有助于自动驾驶领域安全性的重大提升,也为多模态3D目标检测领域后续的研究提供更多的见解。该研究成果同时得到了国家自然基金重点项目课题、国家自然基金面上项目等的支持。
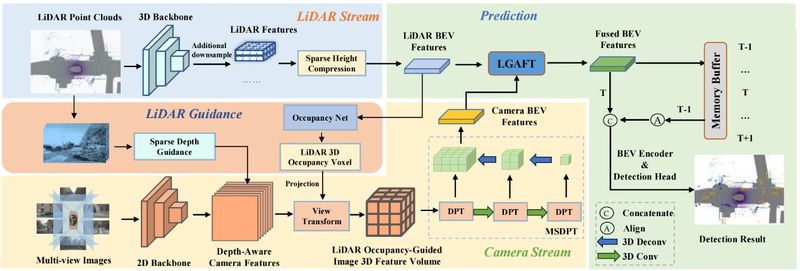
GAFusion算法的整体框架图
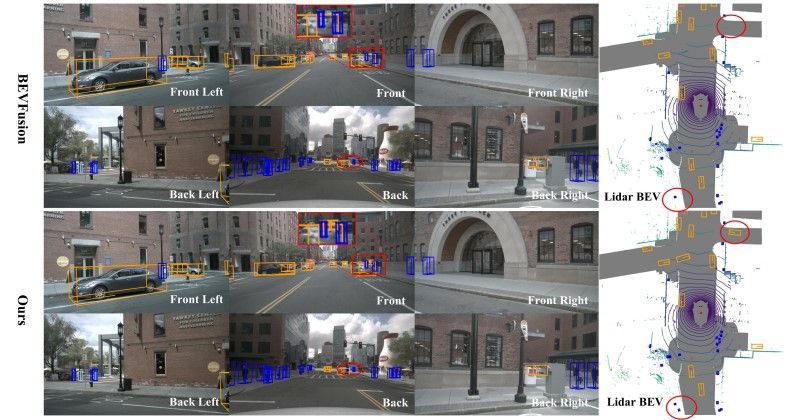
Nuscenes 数据集与BEVFusion对多类目标三维检测结果可视化比较
CVPR(全称IEEE/CVF Conference on Computer Vision and Pattern Recognition)是人工智能与计算机视觉领域最顶级的国际学术会议(CCF A类会议)。据谷歌学术指标最新统计,CVPR位列总榜第4,前三名分别为Nature、NEJM和Science,在计算机学科排名第1。
(信息来源:校园网主页)